Bowen Zeng, Yuxiang Chen, and Yong Li
i Postdoctoral Fellow, University of Alberta, Edmonton, Canada, bzeng1@ualberta.ca
ii Associate Professor, University of Alberta, Edmonton, Canada, ychen5@ualberta.ca
iii Associate Professor, University of Alberta, Edmonton, Canada, yong9@ualberta.ca
ABSTRACT
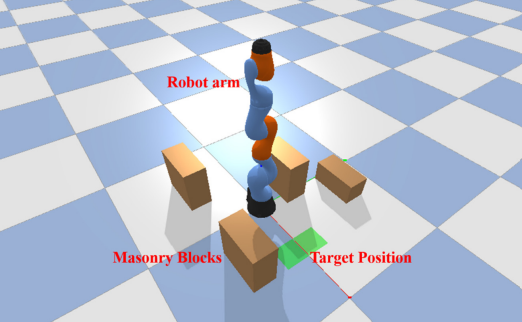
Traditional masonry construction methods face significant challenges in tasks such as masonry block stacking, including labor intensity, quality variability, and the demand for high precision. These challenges often result in inefficiencies and inconsistent outcomes. Robotic construction technology presents a promising alternative by automating repetitive and complex tasks, which can improve efficiency, consistency, and accuracy. However, conventional industrial robots heavily rely on the pre-programming and human insights. Moreover, they are limited by the need for precise control and struggle to adapt to varied construction environments. To overcome these limitations, this study introduces a reinforcement learning (RL) strategy to optimize robotic masonry block dry-stacking. In this approach, the robotic arm autonomously learns and refines its stacking techniques through iterative interactions within a simulated environment that replicates the construction conditions. Performance evaluations indicate that the RL is capable of facilitating the block stacking process during the dry masonry construction, marking a step forward in automated masonry process.
KEYWORDS: Reinforcement Learning, Robotics, Block Dry Stacking, Masonry Construction.
027-Zeng.pdf